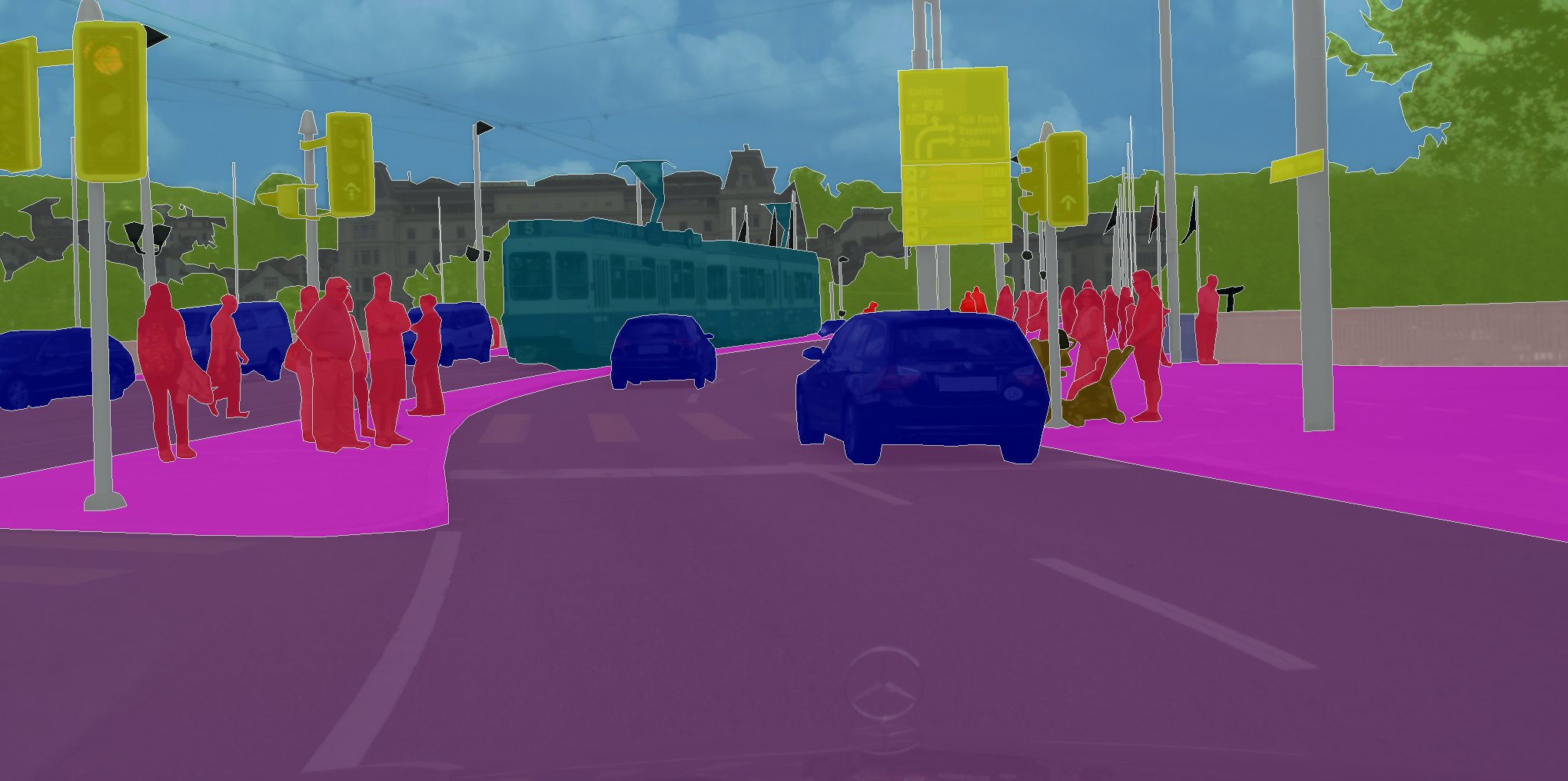
Während das Auto sicher ans Ziel fährt, drehen die Insassen in den Lounge-Chairs gemütlich die Sitze zu den Mitfahrern, unterhalten sich, schreiben E-Mails oder lesen ein Buch. Solche Versprechen mit Bildern erster Prototypen der Automobile der Zukunft werden derzeit von der Autoindustrie und Entwicklern wie Elon Musk verbreitet.
Schon bald sollen wir uns im Auto bequem und sicher zurücklehnen können und die freie Zeit für sinnvollere Beschäftigungen nutzen als die Aufmerksamkeit ständig auf die Straße richten zu müssen. Zugleich verstören uns Nachrichten von Unfällen, in die autonome Fahrzeuge verwickelt sind. Sie schüren Zweifel an der Reife der Technologie und werfen legitime Fragen auf: Wie weit ist die wissenschaftliche und technische Entwicklung auf dem Weg zum autonomen Fahren tatsächlich? Stehen wir kurz vor der flächendeckenden Einführung oder bleibt das alles Zukunftsmusik?
 Fleisch aus dem Labor
Fleisch aus dem Labor  CO2-Speicherung
CO2-Speicherung  Biodiversität
Biodiversität  Fracking
Fracking  Dürre
Dürre  Pränataldiagnostik
Pränataldiagnostik  Ernährungssicherung
Ernährungssicherung  Energiesicherheit
Energiesicherheit  Quantentechnologien
Quantentechnologien  Kinderarmut
Kinderarmut  Nudging
Nudging  Gedenkkultur
Gedenkkultur